Kangaroobot
Fusion 360 • 3D Print (FDM) • Mechatronics • MuJoCo • Machine Learning • Reinforcement Learning
From Nature to Mechanics: Tail-Assisted Walking from the Kangaroo’s playbook.
Kangaroos use their long and strong tail as their “fifth” limb propel themselves forward while walking. The tail could even support their full body weight when they stand up to kick during fights!
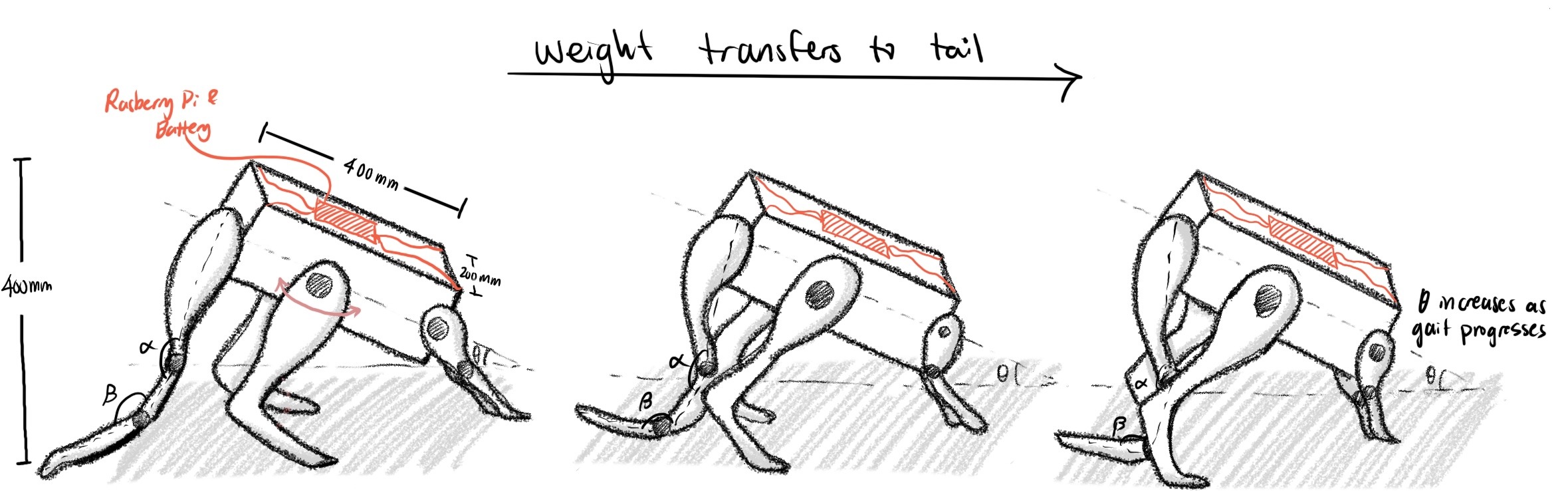
The design objectives are to recreate a kangaroo's stable tail-assisted walking with 8 servos: COM will be slowly transferred to the tail as it progresses, and slowly transferred back to the five points of contact (four legs & tail).
From Sketch to CAD
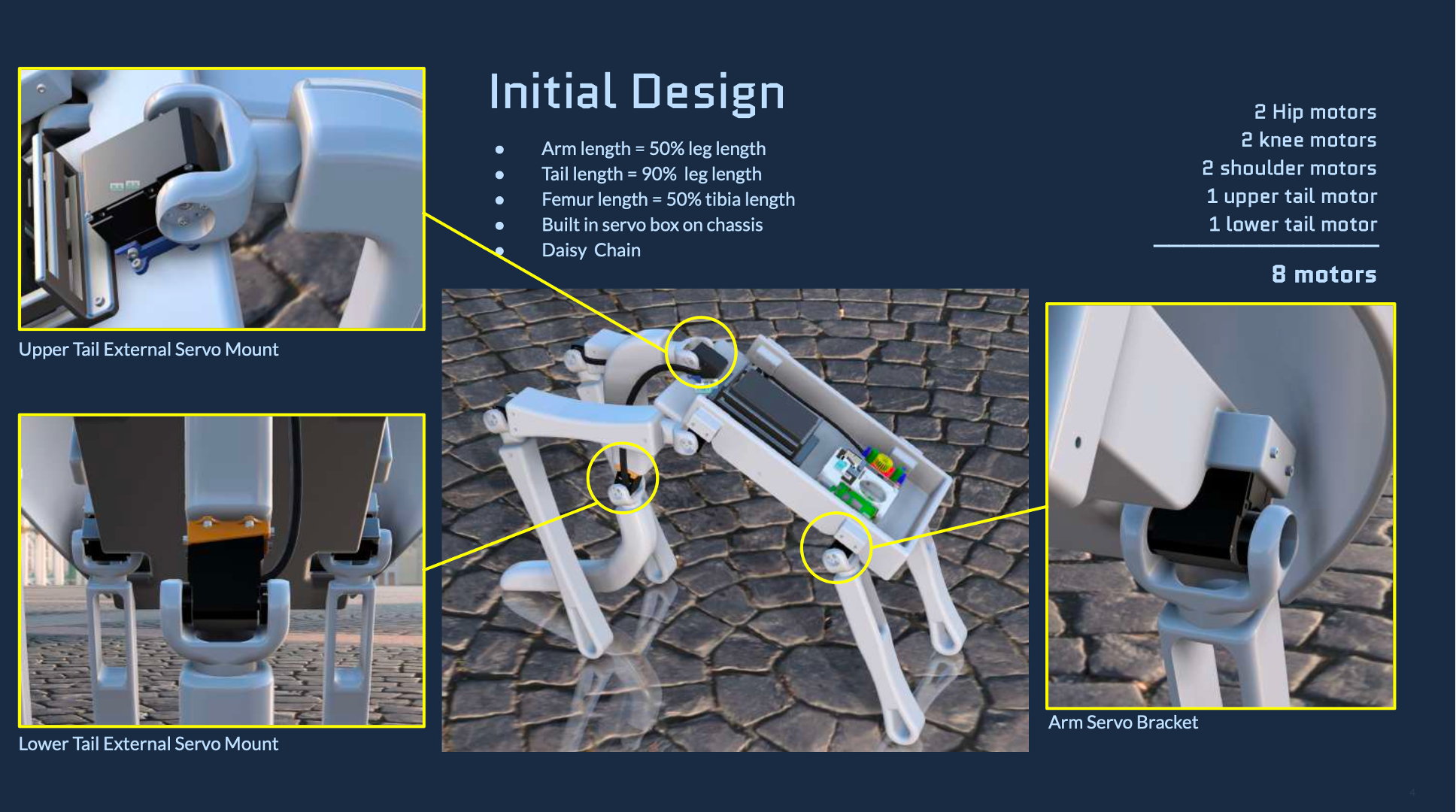
Kangaroobot's birth
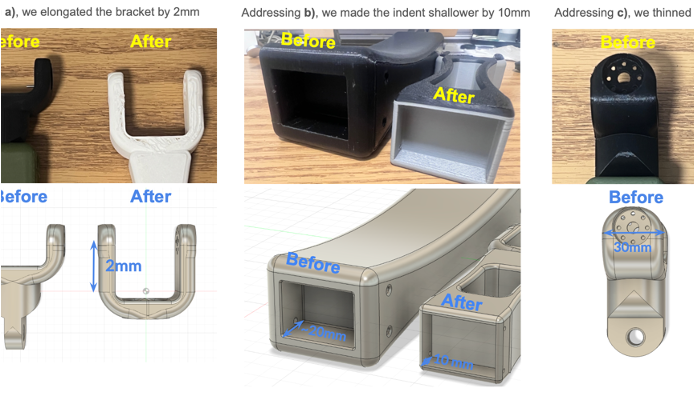
Once the CAD design was finalized, the first physical versions of Kanga were brought to life through FDM 3D printing. Several design iterations were needed to balance the practical trade-offs between quality, time, and performance. With each revision, joint geometry and tolerances were refined to improve mobility and structural reliability. The final design achieved a maximum range of motion of approximately 240° across all joints, allowing Kangaroobot to adopt multiple stable configurations and enabling the flexibility required for dynamic locomotion.
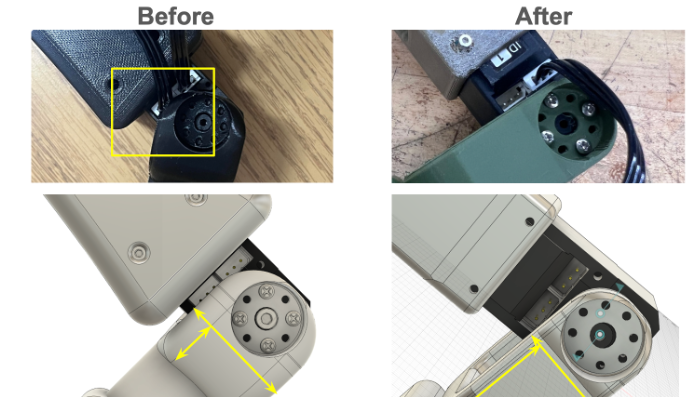

Kangaroobot came into live!
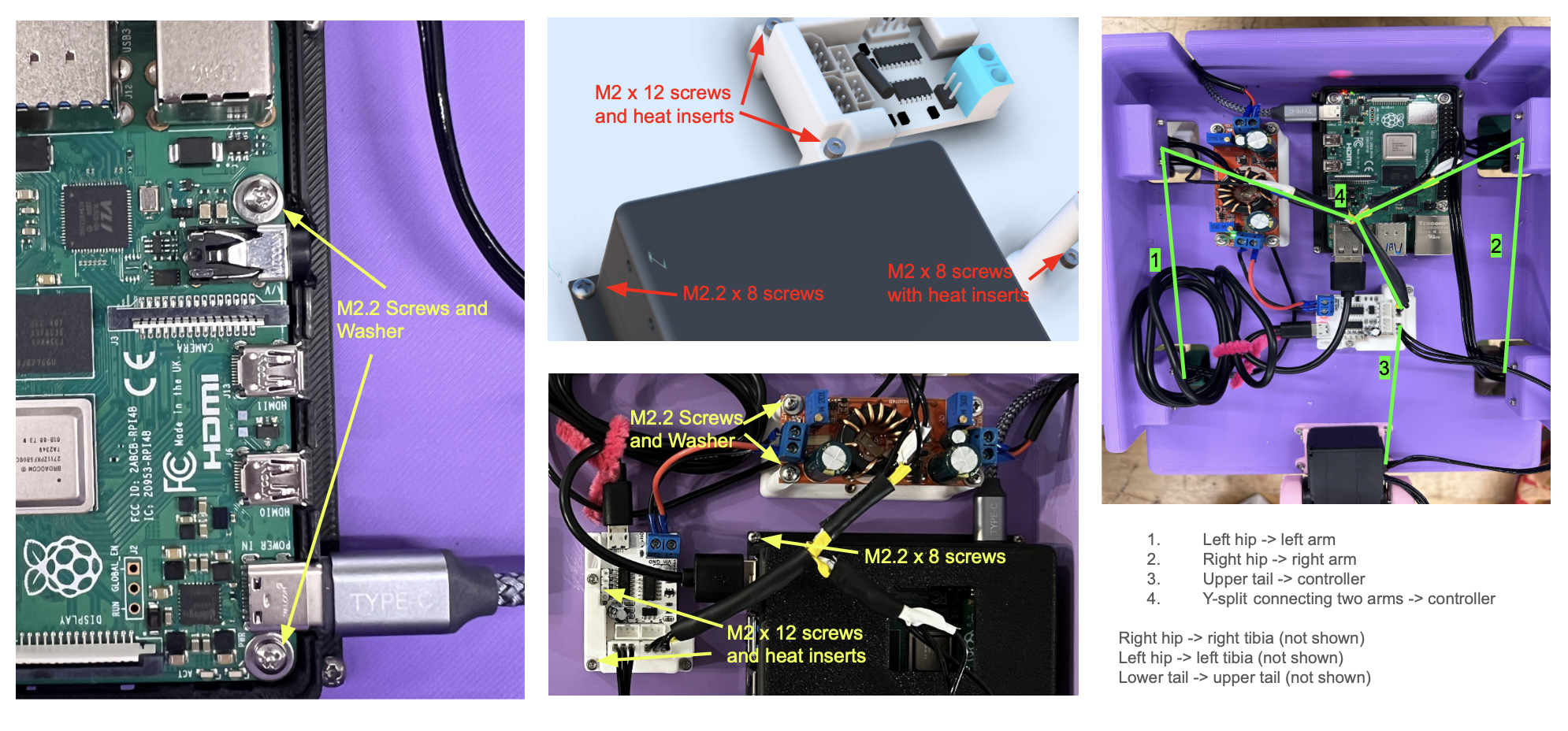
All electrical components were mounted and secured to the frame, with power and signal cables carefully routed to maintain reliability and prevent interference during motion. After bringing the system online and conducting iterative testing through Python, Kanga responds as intended. With the hardware and software finally working together, Kanga took her first successful steps (30cm/s)!
Bonus
She learned how to backflip in MuJoCo!